浙大Nature封面:仿生“软体机器鱼”,畅游世界最深海沟
来源: X-MOL资讯
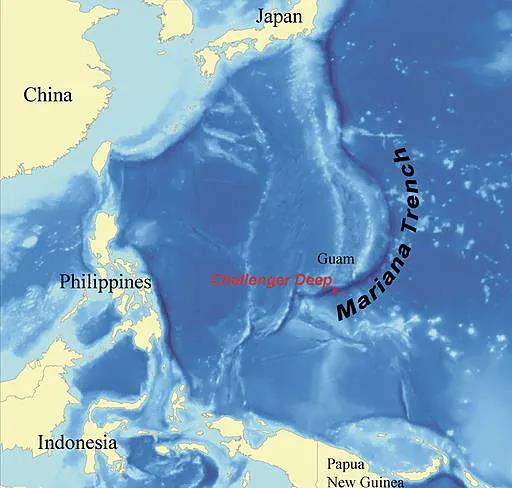
1875年3月,英国的挑战者号航行到西太平洋的马里亚纳群岛,船上的研究者用一根系有重物的绳索探测海底时,发现此处的深度超过8000米,比绳索的极限长度还要深,随后此处被命名为“挑战者深渊”。它还有另外一个更被人熟知的名字——马里亚纳海沟(Mariana Trench),位于关岛和北马里亚纳群岛东部,形成于约六千万年前。这里是目前已知的地球上最深的海沟,最大深度为10984米(一些未重复的测量结果表明,最深部分达到11034米)。也就是说,如果将珠穆朗玛峰填到马里亚纳海沟中,峰顶上据海底还有超过2千米。
从1960年开始,就有探险家们不断地驾驶潜水器去探究这个神秘的“深渊”。2012年我国的“蛟龙号”载人深潜器,首次拜访马里亚纳海沟,下潜至6671米。2020年,我国的“奋斗者”号载人潜水器再探马里亚纳海沟,成功完成13次下潜,并创造了10909米的中国载人深潜纪录。

如此记录得来十分不易。马里亚纳海沟底部水压约为108.6 MPa,相当于1100个大气压,而“奋斗者”号正是以高强高韧钛合金为材料,再辅以先进的设计和焊接工艺,才能扛得住如此高压,保护舱内的研究人员。
说来也有趣,“奋斗者”号上的研究者在万米深海还观察到了类似海参、海绵的生物存在。与我们人类代价高昂的“硬扛”策略不同,它们并没有明显的坚固外壳。其实,海洋中大量的软体生物,如水母、章鱼,都没有坚硬的外壳,却可以承受中等海洋深度(~1000米)处的压力,与此同时还保持着水下自由移动的能力。在6000-11000米左右的海洋深处生存的深海鱼,它们的骨骼分散在柔软的身体中,可以部分打开,有助于它们在高压环境下的生存与活动。浙江大学李铁风教授等研究者由此获得启发,如果能模仿它们的身体结构,开发较低成本的软体机器人作为深海探测器,岂不妙哉?
近日,李铁风教授团队联合中科院深海科学与工程研究所等单位发表论文,报道了一种用于深海探测的仿生软体机器人,并第一次在马里亚纳海沟万米深处实现了自带能源的智能软体机器人万米深海操控,以及深海自主游动实验,验证了电子元件的耐压性能。他们的成果表明,坚硬的外壳或许并非耐高压的必要条件,也为新一代深海勘探器的研发指出了另一条道路。相关工作发表在Nature 杂志,并被选为当期封面,之江实验室研究人员李国瑞、浙江大学博士研究生陈祥平、周方浩为论文共同第一作者,通讯作者为浙江大学李铁风教授。


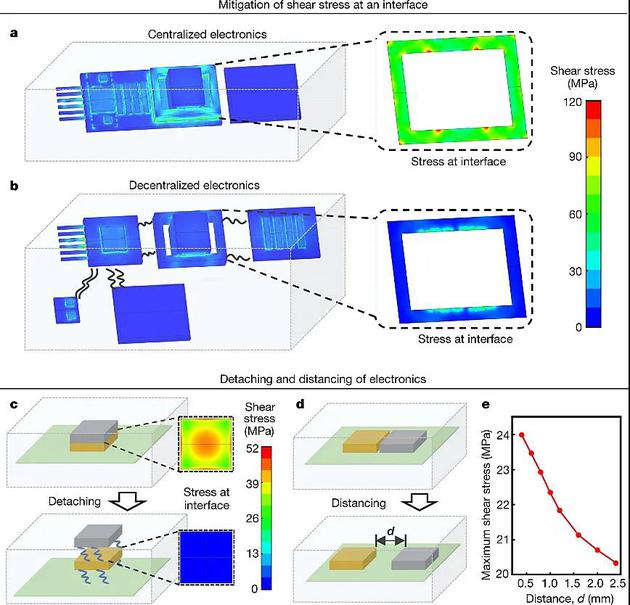
研究者将电池、微控制器、电压放大器等刚性器件封装在聚合物基体中,介电弹性体作为仿生软体机器人的“人工肌肉”。如果将电子元件密集地封装在一块印刷电路板上,在万米海底巨大的压力下,接口处极容易发生故障。为解决这个问题,他们模仿深海鱼骨头分散分布在柔软身体中的特点,将电子元件作为软体机器人的“骨头”,采用分散式设计,增加元件之间的距离,避免刚性接触,减小剪切应力。
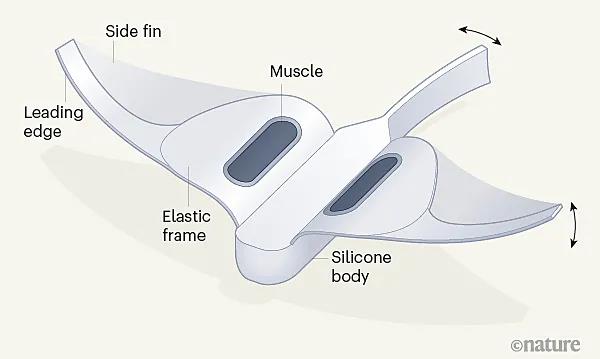
最终制备的这款仿生软体机器人看起来像一条深海鱼,长22 cm,翼展宽度28 cm,大约一张A4纸的大小。除了内部分散的电子元件设计,机器人外观采用弹性的框架支撑,并具有薄硅胶制备的柔性“鱼鳍”。深海的低温(0~4 ℃)和高压环境(110 MPa),对于用于驱动“鱼鳍”拍动的“人工肌肉”也提出了较高要求。研究团队开发了能适应低温高压环境的介电弹性体,可驱动软体机器人的“鱼鳍”完成拍打水的动作,实现水下的自主游动。
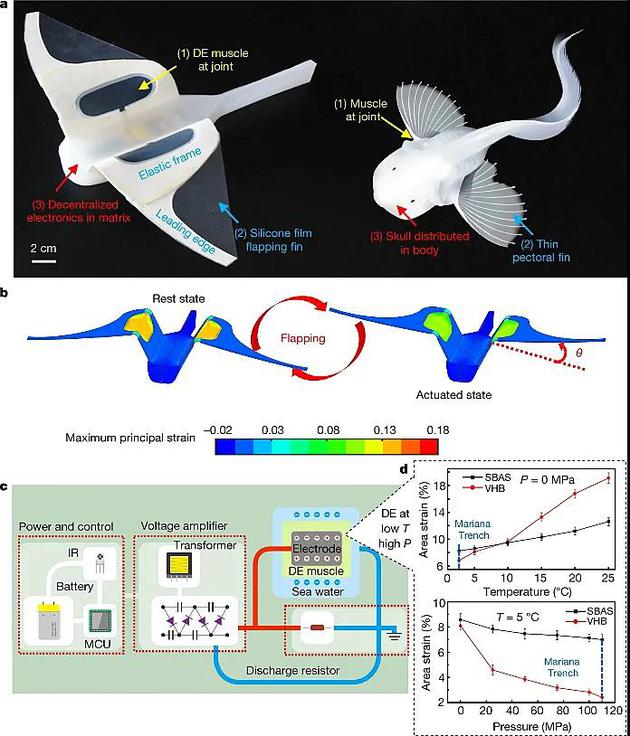
在110 MPa的模拟压力室中,机器人可以完成连杆圆周运动以及自由游泳实验。当驱动电压为7 kV,频率为1 Hz时,机器人在0 MPa和110 MPa的压力下,可以分别以3.29 cm s−1和2.76 cm s−1的速度向前游动。2019年12月,这条仿生“软体机器鱼”首次在马里亚纳海沟10900米深处成功“打卡”,出色的完成了软体机器人的启动和操控,拍动“鱼鳍”长达45分钟,验证了电子元件的耐压性能,并实现了驱动、传感、动力控制等复杂任务。随后,又在3224米深的南海多次完成下潜实验。
“我们的研究目标就是以全新技术路线实现深潜器的小型化、柔性化、智能化,大幅降低深海探测的难度和成本。”李铁风教授说。
从长远来看,软体机器人可以安全地在珊瑚礁或水下洞穴中航行,在不损坏珊瑚礁或洞穴的情况下采集标本,对探索未知的海洋深处、监测海洋、清理和防止海洋污染以及保护海洋生物多样性都具有重大的意义。